
序列图像的差异通常是运动目标检测和跟踪的出发点,认为目标的运动是图像差异的根本原因。但是,这是建立在背景本身不运动的前提下的。因此,在许多跟踪系统中,比如车载,由于车的振动导致传感器位置的变化,表现在图像上就是背景的运动,因此在做差图像和背景自动更新之前,都必须先经过配准,即让所有图像在都同一个坐标...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,然后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。目标识别还可利用再入大气层后的大团过滤技术。当目标群进入大气层时,在大气阻力的作用下,目标群中的真假目标由于轻重和阻力的不同而分开,轻目标、外形不规则的目标开始减速,落在真弹头的后面,从而可以区别目标。慧视微型双光吊舱非常适用于无人机领域。耐用目标跟踪型号
目标跟踪
近年来我国相继出台光伏行业扶持政策,经过多年发展革新,现已经临近产业爆发高峰点。国家能源局发布的《太阳能发展“十三五”规划》中提出,2020年,我国光伏发电飞速发展。现在是光伏发展的比较好时机,同时也意味着,光伏行业距离激烈市场竞争越来越近。慧视光电根据行业对设备数据监控、报警机制及故障流程等实际业务需求,提出巡检及日常管理设备监控解决方案,并为其实现实时视频可视化管理与运行状态数据显示功能、并设置报警机制、故障反馈、调查、分析、检修流程。耐用目标跟踪型号全国产化智能处理板应用广阔。

传统的监控系统需要依靠人对得到的监控视频进行分析,耗时耗力。智能监控系统可以通过目标跟踪、识别等技术自动实现对目标场景的分析和异常检测。随着深度学习在计算机视觉领域的快速发展,智能视频分析技术已经成为安防企业竞争的关键,相关技术已经达到非常高的精度。传统安防技术更多的是关注事后查证的有效性,但随着高清摄像机的普及,如何利用这些资源使设备“活”起来,已经成为越来越多安防企业发展的重点。有了视频分析,就可以及时发现视频中的异常情况,从而及时做出反应,减少损失。
传统的工地,基本是靠人在监督、管理,监督管理人员一旦监督不到位就会出现纰漏,引发事故隐患,因此管理人员和施工人员、管理人员和项目之间不能实时有效的沟通,导致管理人员难以管理项目和施工人员的工作情况,造成项目进度慢、人员安全难管控的问题。而智慧工地的建立可以有效的对工地进行管理。下面我们重点介绍AI算法在智慧工地中起到的作用。1.安全帽监控:可以通过对监控视频的图像处理,有效的实时监控施工人员是否配带安全帽,如果没有佩戴,那么会对相关人员进行框选,然后在后台报警。2.安全作业监控:可以通过对监控视频的图像处理,对违规区域作业进行有效监督。3.物资监控与防盗:可以对进入设定的监控区域内的可疑人员进行有效的提醒,从而起到有效监督物资。慧视光电开发的慧视AI图像处理板,采用了国产高性能CPU。

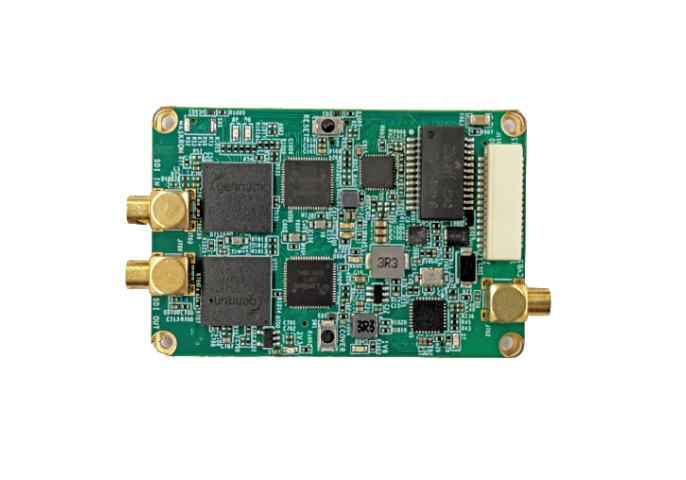
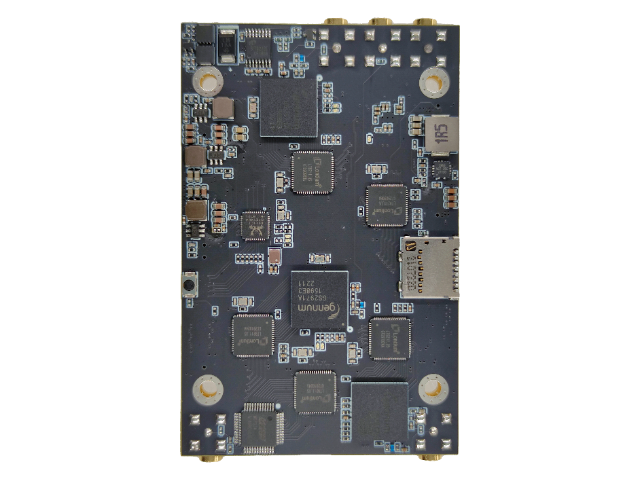
随着国内相关行业市场对图像处理板卡要求的日益提升,成都慧视光电技术有限公司推出了全国产化RV1126重要板。产品作为人工智能通用平台,用于城管、银行、边海防、电力、无人机与机器人、车辆集成等领域,可快速对现有设备完成智能化升级。同时客户可根据需求自己做适配的电源板、电气接口等进行二次开发。慧视光电全国产化RV1126重要板支持基于深度学习的目标检测算法(人、车以及特定目标)、支持SDI高清/标清视频输出、支持叠加OSD信息,重量只有5g,直径只37mm,基本达到了尺寸的要求。成都RV1126智能跟踪板提供商。稳定目标跟踪设备
工程师以RV1126核心板为基础进行定制开发,让摄像头更加智能高效,能够输出高清流的图像视频。耐用目标跟踪型号
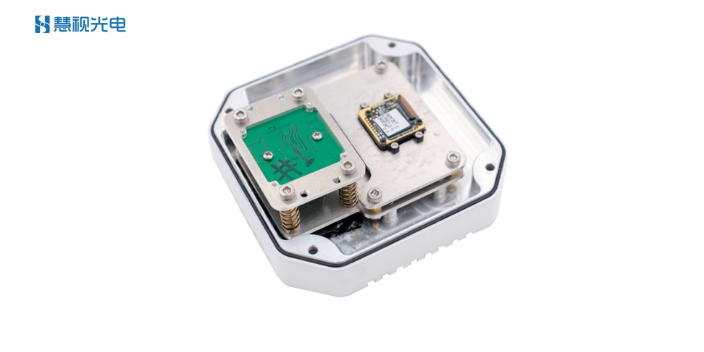
近年来,随着人工智能的发展,无人机的使用呈现出飞速增长,而无人机对目标的自主检测、自主跟踪是极具难度的研究方向之一,这与智慧交通、智慧仓库、智能电力电缆巡检、重要设施的监测等应用密切相关。吊舱是无人机的重要组成部分,而光电吊舱一般由可见光(或者红外)、图像处理板、伺服等部分组成,图像处理板通过前端的图像对目标进行检测并根据需要对目标进行跟踪,同时可能按照具体需要输出目标的坐标数据等信息,因此图像处理板成为了光电吊舱的重要部件之一,起到关键的链接、数据处理的作用。早期光电吊舱因为体积大、重量重、成本高,主要应用在较大的飞机上,尤其作战的飞机。随着民品无人机的发展,大多数四旋翼机的起飞重量小于15公斤,导致了机载设备的有效载荷和电池续航能力非常有限。在这种情况下,如何降低功耗、减少体积同时又不降低性能成为小型无人机的研究热点。慧视光电响应行业需求,经过技术的不断迭代更新,推出了全国产化的RV1126处理板,该处理板支持基于深度学习的目标检测算法(人、车以及特定目标)、支持SDI高清/标清视频输出、支持叠加OSD信息,重量只有5g,直径*37mm,基本达到了尺寸的要求。耐用目标跟踪型号
与目标跟踪相关的文章

宁夏目标跟踪好选择
- 工业目标跟踪解决 2025-12-22
- 江西数据目标跟踪 2025-12-22
- 目标跟踪多少钱 2025-12-21
- 贵州什么目标跟踪 2025-12-21
- 比较好的目标跟踪有哪些 2025-12-21
- 山东目标跟踪多少钱 2025-12-21
- 数据目标跟踪解决 2025-12-21
- 广东质量目标跟踪 2025-12-21
- 湖北目标跟踪参考价格 2025-12-21
- 安徽专业目标跟踪 2025-12-21
- 吉林目标跟踪推荐厂家 2025-12-21
- 数据目标跟踪 2025-12-21
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
吉林目标跟踪经验丰富 2025-12-20 15:01:33我们要追踪的目标可以是各式各样,可能是人类,例如街上的行人、场上的运动员等等,也可以是汽车、飞机、船舶,甚至可以是显微镜下的细胞。虽然对象不尽相同,但是我们都有同一个目的,那就是想要确定这些目标的位置,去向和其他感兴趣的特征等等,这就是多目标追踪。研究多目标追踪的历史,会发现首先是在二战时用作对敌机...
-
新疆目标跟踪市场报价 2025-12-20 04:01:55之所以能产生这种可见运动或表观运动,是因为物体以不同的速度在不同的方向上移动,或者是因为相机在移动(或者两者都有)在很多应用程序中,跟踪表观运动都是极其重要的。它可用来追踪运动中的物体,以测定它们的速度、判断它们的目的地。对于手持摄像机拍摄的视频,可以用这种方法消除抖动或减小抖动幅度,使视频更加平稳...
-
耐用目标跟踪 2025-12-20 06:01:42腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGB...
-
安全目标跟踪好选择 2025-12-20 11:01:26安全生产一直是发展过程中不变的话题。当前,我国建筑行业正处于高速发展阶段,不少建筑工地陆续开工,建筑行业安全也越发受到社会各界的关注。该行业以事故高发、危险系数高而闻名,建筑工人常常暴露于高处坠落、电气和化学危险以及涉及重型机械和车辆的环境中。一般情况下,工地开工都会对工人进行安全教育培训,并且设有...
与目标跟踪相关的问题
新闻资讯
产品推荐
-

山西专业图像处理板
2025-12-30 -

湖北移动目标识别定制
2025-12-30 -

上海图像处理板哪家便宜
2025-12-30 -
江西图像处理板性价比
2025-12-30 -
多系统适配图像处理板好选择
2025-12-30 -

哪些图像处理板推广
2025-12-30 -
北京目标识别自主可控
2025-12-30 -
广西快速图像标注
2025-12-30 -
四川图像处理板推荐厂家
2025-12-30