- 品牌
- 隼星传感
- 型号
- 齐全
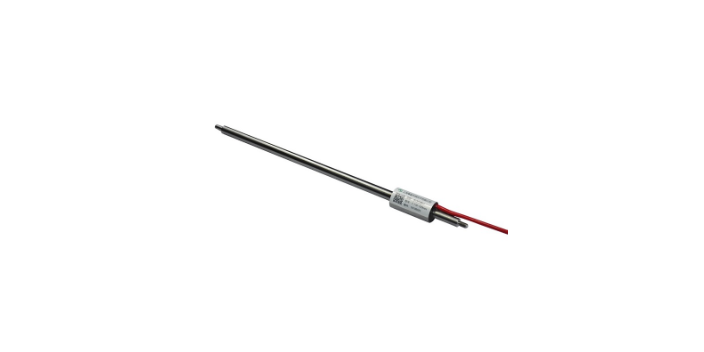
LVDT位移计结构与性能分析。LVDT位移计差动变压器结构设计决定了其存在以下问题:1、为了获得较高的线性,LVDT位移计的量程通常只占线圈长度的几分之一,这导致位移计安装尺寸相对较大。自动化测控系统通常集成大量的位移计与其他元器件,如果要很好地利用空间,就要求位移计体积越小越好;2、LVDT位移计量程越大,线性度相对越低。当位移计精度降低到一定水平,测量便失去了意义。因此LVDT位移计适用于微位移精密测量场合,很少用于大量程位移测量;3、LVDT位移计因为铁芯惯性大、频响低、损耗大,无法用于快速动态信号测量;4、LVDT位移计分辨率与测量范围有关,测量范围越大,位移计分辨率越低;5、LVDT位移计需要采用精密元件组成振荡器,位移计对测量电路要求也较高,需要精密元件组成驱动及信号检出电路,用于保障位移计测量精度与稳定性。这大幅增加了LVDT位移计的加工难度与生产成本;6、LVDT位移计存在难以克服的零点残余电压,影响位移计测量精度。激光位移计是一种带信号处理器的光电测量装置。苏州桥梁位移计参数

位移计的应用场景。1.国土滑坡监测。对国土地灾隐患点表面位移、深部位移及结合GPS卫星定位技术,通过物联网传输协议上报监测预警云平台,为防灾减灾提供实时信息服务。2.景区危岩监测。通过智能位移计对危岩岩体发生形变的倾角、加速度以及裂缝的相对位移量进行监测,直观了解危岩变形状况,指导防灾减灾工作。3.公路边坡监测。对道路高边坡的倾斜程度、滑坡移变化等状况进行实时监测,以防止边坡失稳,保障安全。4.桥梁状态监测。通过长期布设在桥梁上的低功耗物联网位移计测量并记录桥梁的动力加速度、交通载荷等信息并汇入大数据平台只能分析桥梁健康状态。5.电力铁塔监测。低功耗物联网智能位移计监测包括铁塔倾斜数据、摆幅数据等通过物联网传输协议汇总至监测管控后台,为铁塔监控和数据分析提供依据。6.工地脚手架监测。对在建I地脚手架的倾斜角度数据、位移变化等非常规性变化数据进行实时监测,设置预警控制一旦超出常规变化,报警提示人员疏散。苏州桥梁位移计参数振弦式位移计可用于测量土坝、土堤、边坡等结构物的位移、沉陷、应变、滑移,并可同步测量埋设点的温度。

一起来看看多点位移计安装埋设:安装测杆束,灌浆锚固、测头基座安装完成后,就需要安装位移传感器,将位移传感器逐一通过PVC定位芯座上对应定位孔与测杆端接头加螺纹胶旋紧固定可靠。如果发现测杆连接面陷得太深而使传感器无法拧入时,可以加装仪器商预备的加长件。待胶凝固后,用频率读数仪监测状态下调节传感器“零点”,并通过安装在芯座上的予置机构锁定位置。按测点数逐一完成上述调节。每支仪器的埋设零点由监测设计者按该测点的“拉压”范围而定。
位移计即裂缝计等振弦式仪器在监测时,都会或多或少的受到温度的影响,因此我们在监测位移变化的时候,都会尽可能规避温度的影响,因为就位移计计算来说,位移计的计算公式成立前提是,不考虑外界温度变化的。位移计在受到轴向位移变形,其变形位移量和频率模数组成的计算公式如下:J=K△F;△F=F-F0;位移计计算公式中:J是位移计监测的变形量,△F是输出的频率模数。k是标定系数,单位为mm/KHz2;△F是裂缝计实时测量值相对于基准值的变化量;F是裂缝计的实时测量值;F0是裂缝计的基准值。△F、F、F0三个数值的单位皆是KHz2。位移计通过物联网传输协议上报监测预警云平台。
拉线式位移计的使用领域及如何选择。拉线式位移计的选择:1、要根据用户使用量程的大小。2、被测位置对位移计体积的要求。3、测量方式为接触式还是非接触式。4、信号的引出方法,有线或是非接触测量。5、位移计的来源,国产还是进口,价格能否承受,还或者是自行研制。在考虑上述问题之后就能确定选用何种类型的位移计,然后再考虑位移计的具体性能指标。以上描述的就是拉线式位移计的使用领域及如何去选择,位移计在科学技术领域、工农业生产以及日常生活中发挥着越来越重要的作用。位移计可进行存储1600条数据,此类原理产品精确度、稳定性高。苏州桥梁位移计参数
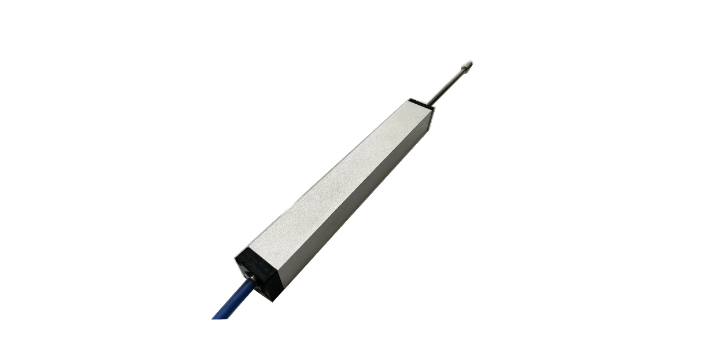
位移计用于桥梁、大型场馆、大坝、边坡、隧道矿井以及各种结构中某一方向位移变化的测量。苏州桥梁位移计参数
激光位移计是一种带信号处理器的光电测量装置。它利用投影原理非接触测量被测体尺寸或者一个物体长度。激光位移传感器是采用激光三角原理或回波分析原理,进行非接触位置、位移测量的精密传感器。应用于位置、位移、厚度、半径、形状、振动、距离等几何量的工业测量。彩色激光同轴位移计在点胶行业的应用,目前业界的普遍做法是采用彩色激光同轴位移计。因为彩色激光同轴位移计是基于光谱共焦传感器的原理,所以使用白光,白光是合成光,并且总是有可以反射回来的光。此外,对于弧形表面,光笔的反射角(45)增加,从而可以完美地测量白色透明胶的轮廓。苏州桥梁位移计参数

数字激光位移计的原理及应用案例。目前,激光位移计按照原理可分为激光三角测量法和激光回波分析法两种,其中激光三角测量法适用于高精度、短距离的测量,激光回波分析法则用于远距离测量。在当前的工业机器人应用中,通常采用三角测量法,这种方法高线性度可达1um,分辨率可达到0.1um的水平。三角测量法的原理是通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出位移计和被测物体之间的距离。位移计可选配拉线传感仪应用于各种裂缝监测环...
- 青岛一体化位移计 2025-12-17
- 海口高可靠性位移计价格 2025-12-17
- 昆明三向位移计供应商 2025-12-17
- 佛山一体化位移计监测系统 2025-12-17
- 南昌振弦式埋入式位移计供应商 2025-12-17
- 东莞高精度位移计分辨率 2025-12-17
- 合肥拉线位移计报价 2025-12-17
- 石家庄单点位移计厂家 2025-12-17
- 昆明智能位移计厂家直销 2025-12-17
- 贵阳三向位移计公司 2025-12-17

- 广州单点位移计分辨率 2025-12-17
- 长沙三向位移计监测系统 2025-12-17
- 厦门振弦式表面位移计输出方式 2025-12-17
- 郑州裂缝位移计供应商 2025-12-17
- 沈阳智能位移计输出方式 2025-12-17
- 西安激光位移计供应商 2025-12-17


- 南昌振弦式埋入式位移计供应商 12-17
- 东莞高精度位移计分辨率 12-17
- 合肥拉线位移计报价 12-17
- 石家庄单点位移计厂家 12-17
- 昆明智能位移计厂家直销 12-17
- 贵阳三向位移计公司 12-17
- 福州振弦式位移计厂家直销 12-17
- 佛山人工位移计线性度 12-17
- 重庆振弦式埋入式位移计供应商 12-17
- 广州顶出位移计生产厂家 12-17