- 品牌
- 朗而美
- 型号
- V1
- 自动化程度
- 自动
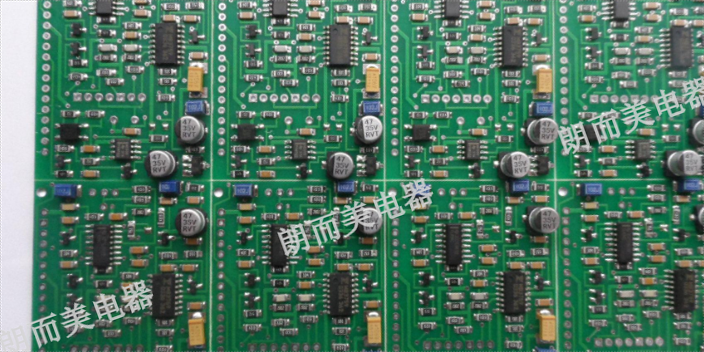
贴片机的工作原理贴片机的分为拱架型贴片机和转塔型拱架型贴片机,介绍两种贴片机的调整治方法及工作原理拱架型贴片机(Gantry):元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。由于贴片头是安装于拱架型的X/Y坐标移动横梁上,所以得名。拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。为什么要用SMT????黑龙江电子贴片加工供应商

PCBA加工焊接要求:1、插装元件在焊接面引脚高度1.5~2.0mm。贴片元件应平贴板面,焊点光滑无毛刺、略呈弧状,焊锡应超过焊端高度的2/3,但不应超过焊端高度。少锡、焊点呈球状或焊锡覆盖贴片均为不良;2、焊点高度:焊锡爬附引脚高度单面板不小于1mm,双面板不小于0.5mm且需透锡。3、焊点形状:呈圆锥状且布满整个焊盘。4、焊点表面:光滑、明亮,无黑斑、助焊剂等杂物,无尖刺、凹坑、气孔、露铜等缺陷。5、焊点强度:与焊盘及引脚充分润湿,无虚焊、假焊。6、焊点截面:元件剪脚尽可能不剪到焊锡部分,在引脚与焊锡的接触面上无裂锡现象。在截面处无尖刺、倒钩。7、针座焊接:针座要求底部贴板插装,且位置端正,方向正确,针座焊接后,底部浮高不超过0.5mm,座体歪斜不超出丝印框。成排的针座还应保持整齐,不允许前后错位或高低不平辽宁PCB贴片加工组装smt贴片机的原理是怎样的?

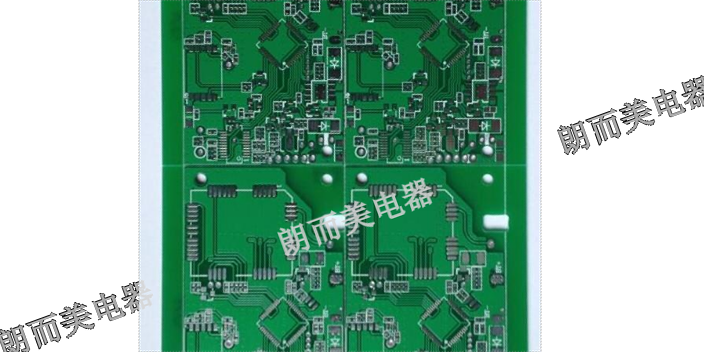
一、什么是PCB?PCB,中文名称为印制电路板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气连接的载体。由于它是采用电子印刷术制作的,故被称为“印刷”电路板。在PCB出现之前,电子元器件之间的互连都是依托电线直接连接完成的。而如今,电线jin用在实验室做试验应用而存在;印刷电路板在电子工业中已肯定占据了控制的地位。二、PCB生产流程:联系厂家→开料→钻孔→沉铜→图形转移→图形电镀→退膜→蚀刻→绿油→字符→镀金手指→成型→测试→终检
pcba加工焊接有什么要求①在焊接的过程中,烙铁头要经常擦洗以免烙铁头沾有脏物或其它杂质而影响焊接点的光洁度。②焊接完成后剪脚时,斜口钳要用好的,并且剪钳不能紧贴线路板,要离线路板2MM左右,以防将焊点剪坏,只可剪去多余端。③pcba板上是卧式的元器件都必须贴平pcba板插上,立式组件必须垂直贴平插在pcba板,不能有组件插的东倒西歪及组件没插平等不良现象。④pcba板浸锡时各锡点要浸的饱满圆滑,各浸锡点不能有没浸上锡和锡点浸的不满等不良现象。目前计算机主板上常被使用之BGA球径为0.76mm。
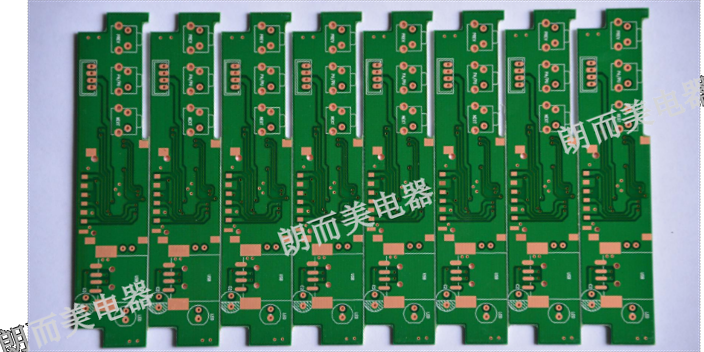
有源器件表面安装芯片载体有两大类:陶瓷和塑料。陶瓷芯片封装的优点是:1)气密性好,对内部结构有良好的保护作用;2)信号路径较短,寄生参数、噪声、延时特性明显改善;3)降低功耗。缺点是因为无引脚吸收焊膏溶化时所产生的应力,封装和基板之间CTE失配可导致焊接时焊点开裂。*常用的陶瓷饼片载体是无引线陶瓷习片载体LCCC。塑料封装被广泛应用于军、民品生产上,具有良好的性价比。其封装形式分为:小外形晶体管SOT;小外形集成电路SOIC;塑封有引线芯片载体PLCC;小外形J封装;塑料扁平封装PQFP。为了有效缩小PCB面积,在器件功能和性能相同的情况下shou选引脚数20以下的SOIC,引脚数20-84之间的PLCC,引脚数大于84的PQFP。在SMT贴片印制电路板上,通孔只用来连接电路板两面的导线。黑龙江电子贴片加工供应商
贴片机的工作流程:一:检查贴片机,二:还原操作点,三:暖机操作,四:生产数据。黑龙江电子贴片加工供应商
随着三十年的发展之后,贴片机由低速、低精度慢慢发展到现在的高速、高精度,无论是在速度还是精度上远远大于人工贴装,在计算机贴装时,采用光学,精密机械、滚珠丝杆、直线导轨、线性马达、谐波驱动器以及真空系统和各种传感器构成的机电一体化的高科技设备。这个时候贴片机已经成为了的he心发展的重要标志。也是我们整个生产线中*关键的设备。朗而美,冷链灯光提供上海朗而美电器有限公司致力成为全球专业的照明系统服务商。公司强调以满足客户现有需求,引导未来应用趋势为中心,将产品的机能性、外观造型、品质作为一个整体有机结合,进行产品的系列化研发,以先进照明技术服务生活。黑龙江电子贴片加工供应商
上海朗而美电器有限公司专注技术创新和产品研发,发展规模团队不断壮大。公司目前拥有专业的技术员工,为员工提供广阔的发展平台与成长空间,为客户提供高质的产品服务,深受员工与客户好评。上海朗而美电器有限公司主营业务涵盖LED照明,SMT加工,照明电器,冷链照明,坚持“质量保证、良好服务、顾客满意”的质量方针,赢得广大客户的支持和信赖。公司深耕LED照明,SMT加工,照明电器,冷链照明,正积蓄着更大的能量,向更广阔的空间、更宽泛的领域拓展。
1、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。2、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它xi牲。这种形式由于贴片头来回移动的距离长,所以速度受到限制。现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。但是实际应用中,同时取料的条件较难达到,而且不同类型...
- 山西哪里有SMT贴片加工定制厂家 2024-11-24
- 山东哪里有SMT贴片加工定制 2024-11-24
- 福建电动贴片加工定制厂家 2024-11-24
- 上海哪里有电子贴片加工组装 2024-11-24
- 山西PCB贴片加工厂家 2024-11-24
- 山西SMT贴片加工公司 2024-11-24
- 上海PCB贴片加工定制厂家 2024-11-23
- 北京PCB贴片加工流程 2024-11-23
- 江苏PCB贴片加工定制 2024-11-23
- 广东贴片加工定制厂家 2024-11-23

- 天津哪里有SMT贴片加工厂家 2024-03-16
- 山东哪里有SMT贴片加工供应商 2024-03-15
- 江西贴片加工厂商 2024-03-15
- 重庆贴片加工厂商 2024-03-15
- 山东SMT贴片加工公司 2024-03-14
- 广东哪里有电子贴片加工 2024-03-14




- 浙江导轨式射灯厂家 05-14
- 贵州酒店射灯大批量采购 05-14
- 北京导轨式射灯制造商 05-14
- 西藏商用射灯厂家 05-14
- 内蒙古KTV射灯厂家 05-13
- 辽宁吊顶射灯大批量采购 05-13
- 山西导轨式射灯批发商家 05-13
- 北京吊顶射灯供应商 05-13
- 广东LED射灯批发厂家 05-13
- 黑龙江LED射灯商家 05-13