在力控打磨系统中,会根据不同工艺需要用到各种型号的砂带,但是砂带存储不当会影响使用使用效果、甚至影响产品的合格率。下面介绍自动打磨机中砂带的储存方法1.砂带的贮存及使用前处理砂带因品种的不同,受气候或环境影响而产生的变化也各异,一般来说,贮存砂带的仓库要阴凉,干燥、通风。砂带要整齐地摆放在货物架上,不能码放在地上。货物架要与地面、墙壁保持一米的距离,同时又要避免靠近散热和排水装置。2.砂带贮存理想温度18~22℃,湿度则为55%~65%.砂带在未使用前,尽可能的不要打开包装物。3.各种树脂砂带,耐水砂带,特别是复合基砂带,纸砂带对贮存条件的要求比较严格。高温、低温又易吸潮变形。聚酯布砂带对寒冷比较敏感,不能贮存在寒冷的仓库内。4.就砂带来说,理想的贮存固然很重要,但使用前若不能得到正确地处理仍会严重的影响它的使用性能。5.砂带使用前应做悬挂处理,即将拆开包装的砂带挂在100~250mm直径的管子上。让其悬挂2~3天,管子直径的选择原则为粒度粗的产品选择直径大的管子,粒度大的选择直径小的管子。6.砂带悬挂的目的是消除因包装而产生的卷曲,同时也是为了使砂带适应工作环境的湿度。砂带悬挂时接头应处于管子上,管子应成水平状态。DFC智能柔性打磨力控系统适合不同行业的智能研磨工作场景。唐山直销力控打磨来电咨询

焊缝打磨包括:平面焊缝余高打磨、曲面焊缝余高打磨、不规则焊缝打磨。对于前两种情况,激光测距仪实时反馈方焊缝的余高以及左右的距离信息,通过内部算法实时计算,调整打磨工具高度与打磨位置,自适应补偿工件本体、焊接过程以及工装所导致的误差,就能实现柔性打磨加工作业。但对于不规则焊缝打磨,除了要定位位置和检测余高之外,还需要准确识别,因此要采用3D视觉检测系统,3D镜头+算法的测量模式,对工件焊缝3D扫描数据进行分析,实现焊缝的识别、准确定位和测量,对焊缝进行智能打磨。木材制品打磨有其行业标准:AQ4228-2012木材加工系统粉尘防爆安全规范,规定了工业生产中木材及木制品、人造板、木粉的加工处理系统中产生的木质及其他纤维质材料的粉尘的防爆安全要求。所以,用于这方面的机器人需为防爆机器人,若没有防爆系统,那必须给机器人穿上防爆外衣,这样可以很大程度上降低粉尘爆燃的风险。厦门直销力控打磨研磨打磨力控系统实现的柔性打磨,产品用应用范围广,可以自动适应产品外形尺寸变化。

因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很高。大儒科技通过智能柔性打磨力控系统简化了复杂轨迹编程问题和机器人靠进给调整打磨力的难点。在打磨过程中的打磨力柔性控制提高了工件的打磨质量、加工效率。大儒科技的力控系统可快速对绝大部分复杂工件完成机器人打磨工艺调试,如圆弧面、倒角等异性面。用户可快速创建复杂运动程序并验证工艺的合理性,可部署在多种机器人上。
目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。打磨力控系统支持打磨抛光工艺简化,检测、打磨抛光效率自主优化和磨料损耗自动监测。

市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。使用打磨力控系统的打磨机器人可以降低机器人对示教精度的要求。泉州什么是力控打磨详情
打磨力控系统可以实现智能打磨生产中工件打磨表面效果取得一致。唐山直销力控打磨来电咨询
在现有技术中,金属表面的打磨处理目前大部分还依赖于人工,专机打磨和机器人打磨的表面粗糙度不稳定导致良率不高且对后续的表面处理带来很大的影响。
目前市面上打磨机器人还存在一些未能解决的问题:a、局限于手臂垂直平面的打磨,手臂角度不可变化,否则会受到角度产生的分力影响;b、打磨机快速触碰到产品时,由于机器人执行动作的响应速度比系统运算速度慢,会产生超出力控要求的很大的一个力,大幅度影响产品的品质,因此只能慢速的靠近,从而影响生产效率;c、当打磨机刚触碰到产品或在打磨过程中碰到一个超出控制力范围的力值时,打磨机会有跳动现象,会造成产品表面粗糙度不一致,从而影响产品的品质稳定。
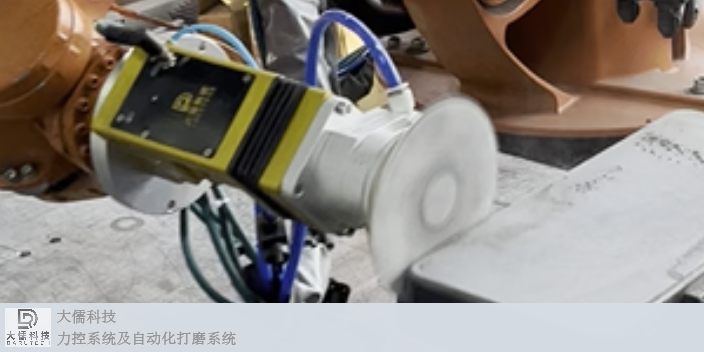
在机器人手臂末端安装力控系统和打磨机,力控系统瞬间接触产品及运行过程中采用柔性浮动的控制方式,受力瞬间即可迅速反应作出调整,确保力的控制精度,实现智能柔性的力控打磨。 唐山直销力控打磨来电咨询
大儒科技(苏州)有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来大儒科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!