- 品牌
- 朗而美
- 型号
- V1
- 自动化程度
- 自动
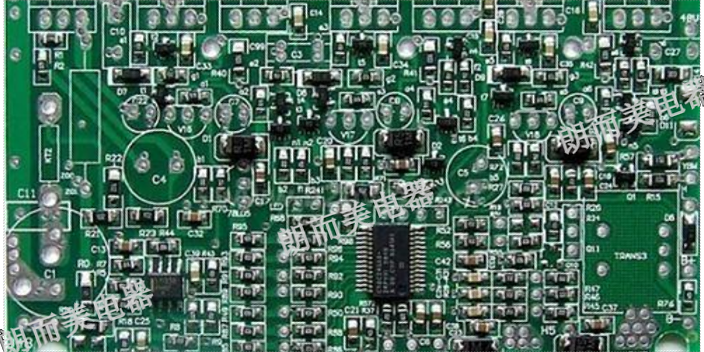
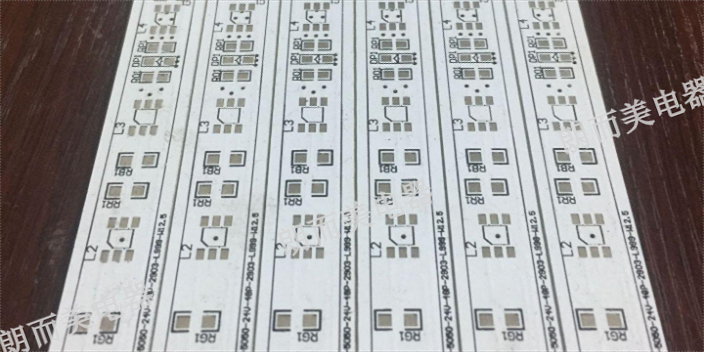
双面组装工艺A:来料检测,PCB的A面丝印焊膏(点贴片胶),贴片,烘干(固化),A面回流焊接,清洗,翻板;PCB的B面丝印焊膏(点贴片胶),贴片,烘干,回流焊接(*好jin对B面,清洗,检测,返修)此工艺适用于在PCB两面均贴装有PLCC等较大的SMD时采。B:来料检测,PCB的A面丝印焊膏(点贴片胶),贴片,烘干(固化),A面回流焊接,清洗,翻板;PCB的B面点贴片胶,贴片,固化,B面波峰焊,清洗,检测,返修)此工艺适用于在PCB的A面回流。SMT是表面组装技术(表面贴装技术)(Surface Mounted Technology的缩写)。湖北贴片加工供应商

1、进行元件识别,读取元件库的元件特征与吸拾的元件进行比较。若比较评测后不符合,则将元件抛到废料盒中。若比较评测符合后则对元件的中心位置及角度进行计算;2、根据程序中设定,经过贴片头的Z轴来调整元件的旋转角度,通过贴片头移动到程序设定好的位置,使得元件中心与PCB板贴装位置点重合;3、贴片机吸嘴会下降到程序设定好的高度,关闭真空,元件落下,就完成了一次元件贴装操作;4、SMT贴片机元件全部贴装完成后,吸嘴放置归位,将PCB板传送到设定的位置。完成整次PCB板的贴装操作。湖北贴片加工供应商贴片机的原理又是做什么的?
1、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。2、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它xi牲。这种形式由于贴片头来回移动的距离长,所以速度受到限制。现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。但是实际应用中,同时取料的条件较难达到,而且不同类型的元件需要换用不同的真空吸料嘴,换吸料嘴有时间上的延误。
贴片机适用于表面贴装技术,它的工作原理是:用一种方式将我们的元器件准确无误的贴装在指定的位置上,一直到现在技术适用于广大加工生产类型的企业,那么为什么能够这样受人欢迎呢?我们一起来了解一下贴片机的发展吧。在加工生产的初期:由于元器件的尺寸较大,人们采用人工的方法即可完成贴装任务,但是随着时代的发展,一直到jin天,为了满足广大用户的需求,贴装技术一点点变得精细化,所以,人们开始重视贴片机这种计算机贴装技术来进行元器件的贴装加工。免清洗可减少组板(PCBA)在移动与清洗过程中造成的伤害。仍有部分元件不堪清洗。
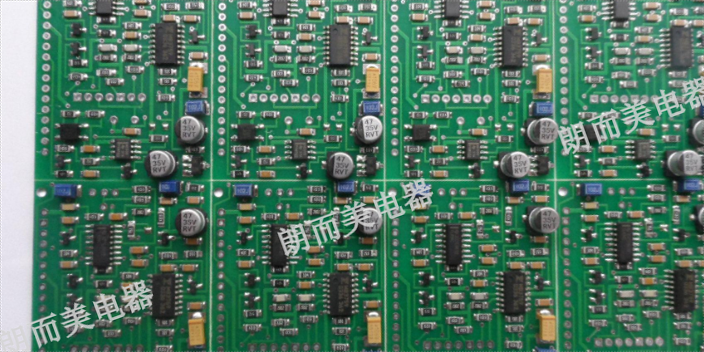
PCBA和PCB的区别:从上面的介绍就可知道,PCBA泛指的是一个加工流程,也可以理解为成品线路板,也就PCB板上的工序都完成了后才能算PCBA。而PCB则指的是一块空的印刷线路板,上面没有零件。随着电子机器的高速高性能超小型化,封装技术获得长足发展。芯片尺寸封装CSP和BGA封装向多引线端和窄引线间距方向发展,并且裸芯片(BareChip)封装也已实用化。由于这些封装技术的进步,对于印刷电路板PCB(PrintedWiringBoard)也提出新要求(适应高密度封装和高速化需求)。点胶:它是将胶水滴到PCB板的固定位置上,其主要作用是将元器件固定到PCB板上。湖北贴片加工供应商
3、清洗剂残留在机板上带来腐蚀现象,严重影响产品质素。湖北贴片加工供应商
SMT贴片机贴装前准备1、准备相关产品工艺文件。2、根据产品工艺文件的贴装明细表领料(PCB、元器件),并进行核对。3、对已经开启包装的PCB,根据开封时间的长短及是否受潮或污染等具体情况,进行清洗和烘烤处理。4、开封后检查元器件,对受潮元器件按照SMT工艺元器件管理要求处理。5、按元器件的规格及类型选择遁合的供料器,并正确安装元器件编带供料器。装料时-。协须将元器件的中心对准供料器的拾片中心。6、设备状态检查:a、检查空气压缩机的气压应达到设备要求,一般为6kgjf/cm2~7kgf/cm2。b、检查并确保导轨、贴装头移动范围内、自动更换吸嘴库周围、托盘架上没有任何障碍物。湖北贴片加工供应商
上海朗而美电器有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在上海市等地区的照明工业中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身不努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同上海朗而美电器供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!
1、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。2、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它xi牲。这种形式由于贴片头来回移动的距离长,所以速度受到限制。现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。但是实际应用中,同时取料的条件较难达到,而且不同类型...
- 山西哪里有SMT贴片加工定制厂家 2024-11-24
- 山东哪里有SMT贴片加工定制 2024-11-24
- 福建电动贴片加工定制厂家 2024-11-24
- 上海哪里有电子贴片加工组装 2024-11-24
- 山西PCB贴片加工厂家 2024-11-24
- 山西SMT贴片加工公司 2024-11-24
- 上海PCB贴片加工定制厂家 2024-11-23
- 北京PCB贴片加工流程 2024-11-23
- 江苏PCB贴片加工定制 2024-11-23
- 广东贴片加工定制厂家 2024-11-23
- 天津哪里有SMT贴片加工厂家 2024-03-16
- 山东哪里有SMT贴片加工供应商 2024-03-15
- 江西贴片加工厂商 2024-03-15
- 重庆贴片加工厂商 2024-03-15
- 山东SMT贴片加工公司 2024-03-14
- 广东哪里有电子贴片加工 2024-03-14



- 上海吊顶射灯批发厂家 05-19
- 四川LED照明灯管供应商 05-19
- 新疆超市照明灯 05-19
- 河南LED灯管价格 05-19
- 山西生鲜LED照明灯报价 05-19
- 广西天花板射灯批发厂家 05-19
- 陕西灯条价格 05-19
- 山东附近灯条灯带批发 05-19
- 河北LED防水灯管批发供应商 05-19
- 广西超市照明灯供应商 05-19