- 品牌
- 朗而美
- 型号
- V1
- 自动化程度
- 自动
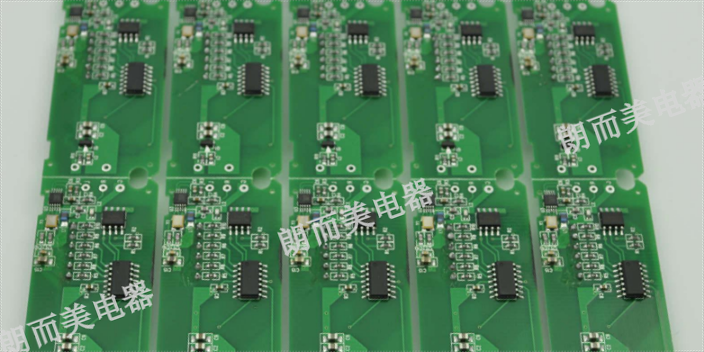
1、进行元件识别,读取元件库的元件特征与吸拾的元件进行比较。若比较评测后不符合,则将元件抛到废料盒中。若比较评测符合后则对元件的中心位置及角度进行计算;2、根据程序中设定,经过贴片头的Z轴来调整元件的旋转角度,通过贴片头移动到程序设定好的位置,使得元件中心与PCB板贴装位置点重合;3、贴片机吸嘴会下降到程序设定好的高度,关闭真空,元件落下,就完成了一次元件贴装操作;4、SMT贴片机元件全部贴装完成后,吸嘴放置归位,将PCB板传送到设定的位置。完成整次PCB板的贴装操作。smt贴片机的工作流程是什么?四川电子贴片加工公司
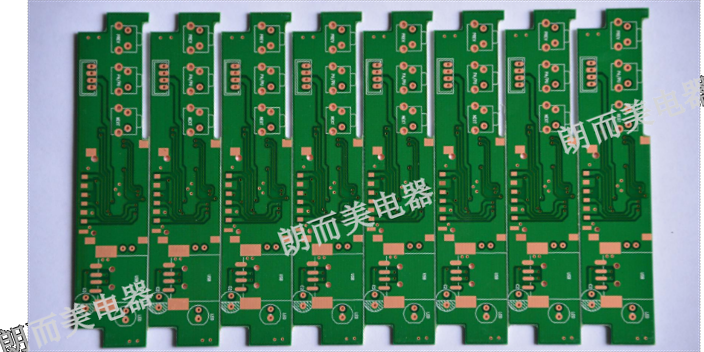
1、常用的SMT钢板的原料为不锈钢;2、ECN中文全称为:工程改变通知单;SWR中文全称为:特别需要工作单﹐有必要由各关联部分会签,文件中间分发,方为有用;3、5S的具体内容为整理﹑整理﹑清扫﹑清洁﹑素质;4、PCB真空包装的意图是防尘及防潮;5、钢板的开孔型式方形﹑三角形﹑圆形,星形,本磊形;6、当前运用之计算机边PCB,其原料为:玻纤板FR4;7、Sn62Pb36Ag2之焊锡膏首常用的SMT钢板的厚度为0、15mm;要试用于何种基板陶瓷板;安徽电动贴片加工定制对于我们一个刚刚使用SMT贴片机的人来说,贴片机的基本操作是一项至关重要的技能。
1、通常常用的锡膏合金成份为Sn/Pb合金,且合金份额为63/37;2、ESD的全称是Electro-staTIcdischarge,中文意思为静电放电;3、制造SMT设备程序时,程序中包括五大有些,分别为为PCBdata;Markdata;Feederdata;Nozzledata;Partdata;4、无铅焊锡Sn/Ag/Cu96、5/3、0/0、5的熔点为217C;5、零件干燥箱的操控相对温湿度为《10%;6、锡膏运用时有必要从冰箱中取出回温,意图是:让冷藏的锡膏温度回复常温﹐以利打印。若是不回温则在PCBA进Reflow后易发生的不良为锡珠;
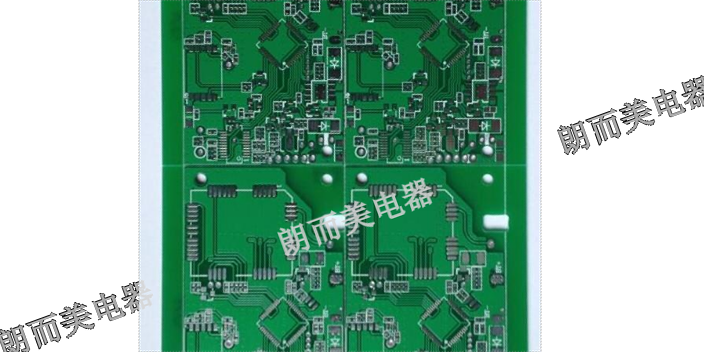
一、PCD校准我们再表面贴装元件的时候,一定要进行PCD校准的工作,而元器件的贴装坐标,一般是从左下角,或者是右上角作为原点,我们在进行高精度贴装时,这个步骤无疑是很重要的。二、检测调准我们的SMT贴片机在吸取元器件之后一定要确定两个问题:1.元器件的中心与贴装头的中心是否一致2.元器件是否符合贴装要求。两点缺一不可。三、拾取元器件拾取元器件也是非常重要的一项操作,它所占用的时间和准确性是关键,我们一般的拾取方式分为三种,一种是人工拾取,一种是机械爪拾取,一种是真空拾取,而我们一般采用的是真空拾取的方式。、丝印:其作用是将焊膏或贴片胶漏印到PCB的焊盘上,为元器件的焊接做准备。
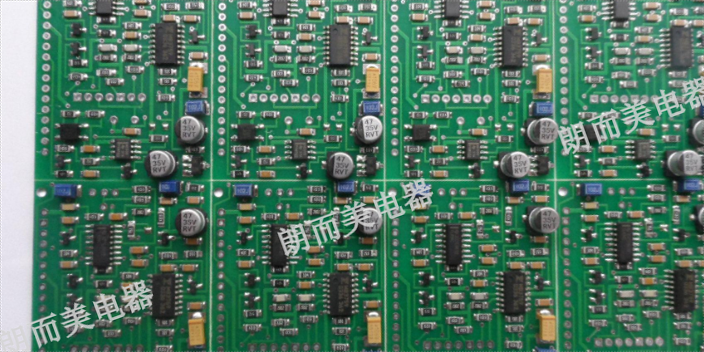
贴片机的工作原理贴片机的分为拱架型贴片机和转塔型拱架型贴片机,介绍两种贴片机的调整治方法及工作原理拱架型贴片机(Gantry):元件送料器、基板(PCB)是固定的,贴片头(安装多个真空吸料嘴)在送料器与基板之间来回移动,将元件从送料器取出,经过对元件位置与方向的调整,然后贴放于基板上。由于贴片头是安装于拱架型的X/Y坐标移动横梁上,所以得名。拱架型贴片机对元件位置与方向的调整方法:1)、机械对中调整位置、吸嘴旋转调整方向,这种方法能达到的精度有限,较晚的机型已再不采用。SMT贴片机的工作原理?四川电子贴片加工公司
陶瓷芯片电容ECA-0105Y-K31误差为±10%。四川电子贴片加工公司
PCB采购和贴片加工是两种不同的生产方法,很多电子厂家只专其中一种方式,这就需要电子产品生产商在选择PCBA加工厂家时,要综合考虑厂家实力,选择经验丰富,能出色完成整个加工流程的厂家。上海朗而美电器有限公司就是这样一家专业的PCBA贴片加工厂家,提供PCB、SMT加工一站式服务。拥有15年的PCBA贴片加工经验,能够提供PCBA代工代料、PCB线路板制作、SMT贴片加工、元器件dai购、贴片插件焊接、组装测试等一条龙服务,为客户省去麻烦,降低成本,带来更you质产品。四川电子贴片加工公司
上海朗而美电器有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在上海市等地区的照明工业行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**上海朗而美电器供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
1、激光识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,这种方法可实现飞行过程中的识别,但不能用于球栅列陈元件BGA。2、相机识别、X/Y坐标系统调整位置、吸嘴旋转调整方向,一般相机固定,贴片头飞行划过相机上空,进行成像识别,比激光识别耽误一点时间,但可识别任何元件,也有实现飞行过程中的识别的相机识别系统,机械结构方面有其它xi牲。这种形式由于贴片头来回移动的距离长,所以速度受到限制。现在一般采用多个真空吸料嘴同时取料(多达上十个)和采用双梁系统来提高速度,即一个梁上的贴片头在取料的同时,另一个梁上的贴片头贴放元件,速度几乎比单梁系统快一倍。但是实际应用中,同时取料的条件较难达到,而且不同类型...
- 山西哪里有SMT贴片加工定制厂家 2024-11-24
- 山东哪里有SMT贴片加工定制 2024-11-24
- 福建电动贴片加工定制厂家 2024-11-24
- 上海哪里有电子贴片加工组装 2024-11-24
- 山西PCB贴片加工厂家 2024-11-24
- 山西SMT贴片加工公司 2024-11-24
- 上海PCB贴片加工定制厂家 2024-11-23
- 北京PCB贴片加工流程 2024-11-23
- 江苏PCB贴片加工定制 2024-11-23
- 广东贴片加工定制厂家 2024-11-23

- 天津哪里有SMT贴片加工厂家 2024-03-16
- 山东哪里有SMT贴片加工供应商 2024-03-15
- 江西贴片加工厂商 2024-03-15
- 重庆贴片加工厂商 2024-03-15
- 山东SMT贴片加工公司 2024-03-14
- 广东哪里有电子贴片加工 2024-03-14





- 江西LED灯条批发 05-21
- 贵州LED灯条灯带批发 05-21
- 海南LED照明灯条批发供应商 05-20
- 青海生鲜照明灯价格 05-20
- 福建灯条批发供应商 05-20
- 湖北附近灯条采灯带购供应商 05-20
- 北京LED灯条报价 05-20
- 上海防水灯条采灯带购供应商 05-20
- 西藏附近灯条灯带报价 05-20
- 上海LED灯条采灯带购供应商 05-20