
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。 漆面缺陷检测装置效率高、成像质量高、系统结构紧凑、成本低,可用于大型复杂曲面的镜面缺陷检测。上海工业质检汽车面漆检测设备供应商家
汽车面漆检测设备
从而带动所述第二锥齿轮38转动,从而带动所述diyi锥齿轮43转动,此时所述螺纹套41转动带动所述螺纹杆40移动,从而带动左右两个所述滑动块46移动,所述滑动块46移动带动所述喷头16移动,由于此时所述机身10处于远离需要补油漆的汽车表面一侧,所述三通阀56将左侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出油漆从而对汽车表面进行油漆覆盖,此时由于所述密封罩15与汽车表面贴合,油漆不会扩散出所述密封罩15外部,从而保护汽车表面不受多余油漆污染,当所述滑动块46移动至*右侧时启动所述第二电机48带动所述第三转轴51反转,多次重复上述操作后,汽车表面油膜厚度达到标准值;2、待油漆干后,向下按压所述机身10,此时所述花键杆23自上而下依次卡入所述锁定槽21内,从而调整机身10与所述汽车表面距离,当所述抛光轮44与油漆表面贴合并被压缩后,启动所述此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。江苏偏折光学法汽车面漆检测设备供应商家基于计算机视觉的表面缺陷自动检测作为一种快速发展的新型检测技术,具有速度快、效率高等优点。

当所述机身10远离需要补油漆的汽车表面时所述三通阀56将左侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时,所述喷头16能够喷射出油漆,当所述机身10贴近需要补油漆的汽车表面时所述三通阀56将右侧的所述diyi连通管55与所述第二连通管57连通,此时启动所述气泵17时所述喷头16能喷射出抛光液,此时配合所述抛光轮44转动可实现汽车外漆抛光。,本实施例所述固定连接方法包括但不限于螺栓固定、焊接等方法。如图1-4所示,本发明的设备在初始状态时,所述机身10与所述限位块24贴合,所述花键杆23末端斜面朝下,所述第二连通管57与左侧的所述diyi连通管55连通。整个装置的机械动作的顺序:1、当本发明的设备工作时,首先将汽车划痕周边清理干净,将设备搬运至需要修补的划痕上方,将设备底部设置的四个活塞18吸附到汽车表面,向左侧的所述储液腔28内加入汽车原厂油漆,同时向右侧的所述储液腔28内加入抛光液,此时启动所述第二电机48带动所述第三转轴51转动,所述第三转轴51转动带动所述第二齿轮49与所述第三齿轮53转动,由于所述第三齿轮53与所述内齿圈52啮合,此时所述第三齿轮53转动带动所述转动架13转动,同时所述第二齿轮49转动带动所述第二转轴36转动。
在检测时计算机系统需要处理大量图像,因此需要更优的计算机处理器。在车身检测过程中,则分为五部分展开,分别为车身前盖、车顶、左边、右边和后盖,其中各自安装一台计算机处理器,通过通讯主机实现交互通信,进而得出总体检测结果。检测系统的视觉传感器则分别固定在车身的周边位置,通过设置一定的扫描重叠区,保证检测区域能够完全覆盖车辆表面。2自动检测技术在汽车涂装质量检测中的应用流程车辆在达到检测站之前,车身信息读写站会将目标车辆的相关数据进行统计并发送给检测系统,主要信息包括车身的基本型号、车身表面的喷漆颜色、车顶的特殊形式、是否存在天线孔等。检测系统在收到型号信息后,可以根据对应型号加载数据参数。当车辆行进触发光电开关传感器后,检测系统正式开始工作,由编码器发出的脉冲信号进行图像采集工作,直到完成检测任务。图像采集图像采集是自动检测的首要个环节,每一个传感器通过扫描车身的特定区域,采集800-1000张高清晰度图像,根据车辆表面的面积大小,所采集的图像个数有一定浮动空间,但其图像会完整覆盖车身表面,保证检测目标不出现任何遗漏。在车身通过检测系统时,视觉传感器会一直根据编码器生成的信号记录对应图像。我们的设备可实现全自动检测,检出率高达99%。

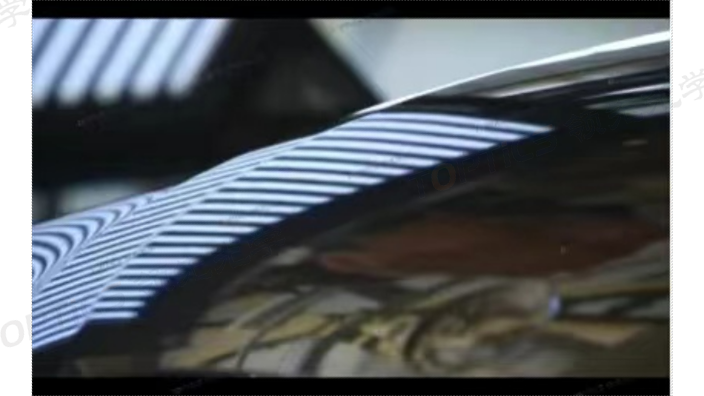
汽车涂装是汽车生产制造过程中一个重要的环节,车身喷涂不仅可以提供外观装饰,而且可以对车身表面进行保护。然而,在实际的涂装生产中,由于涂装车间环境的影响,油漆的质量和涂装工艺的不同,使得涂膜的车体很容易产生不同类型的缺陷,比如杂质、喷涂污染等典型表面瑕疵,如何准确地实现汽车表面涂装质量自动化测量极其关键。为提升效率、减少人工,基于机器视觉的汽车表面质量测量已开始应用在汽车涂装检测领域。与传统人工目视测量相比,视觉表面质量测量采用全自动检测,具有极高的敏感度和大视野,可高效、高精度对汽车涂装质量进行检测,比较大限度的避免整车返工。打破了漆面质量缺陷自动检测技术被国外垄断的现状,同时应用机器人识别的新模式,实现了技术转变为生产力。宁德光学方法汽车面漆检测设备哪家好
可用于优化过程控制参数,降低缺陷发生率,从根本上实现工艺优化。上海工业质检汽车面漆检测设备供应商家
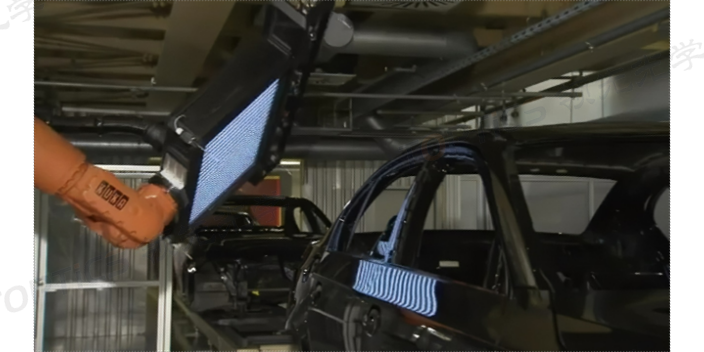
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。上海工业质检汽车面漆检测设备供应商家
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。

所述螺纹孔内螺纹连接有与左右两个所述滑动块均固定的螺纹杆,所述转动架转动是利用所述传动腔顶壁内设置的传动装置带动所述螺纹套转动,从而带动所述螺纹杆移动,所述螺纹杆移动能够带动左右两个所述滑动块同步移动,其中左侧的所述滑动块内设置有气泵,所述气泵可以在不同时间喷出油漆或抛光液,右侧的所述滑动块底壁内设置有diyi电机,所述diyi电机输出轴末端固定设置有抛光轮,所述抛光轮高速转动同时伴随所述转动架高速转动可以实现对油漆的抛光;所述机身四个边角设置有上下贯通的滑动孔,这些系统通常配备有高分辨率相机和强大的图像处理单元,可以在极短的时间内完成对整个车身表面的详细扫描;泉州高精度汽车面漆检测设备推荐厂...
- 呼和浩特汽车面漆检测设备源头厂家 2024-12-27
- 武汉非隧道式汽车面漆检测设备推荐厂家 2024-12-27
- 吉林光学方法汽车面漆检测设备推荐 2024-12-27
- 鞍山代替人工汽车面漆检测设备供应商家 2024-12-27
- 鞍山高精度汽车面漆检测设备 2024-12-27
- 大连偏折光学法汽车面漆检测设备生产厂家 2024-12-27
- 泉州偏折光学法汽车面漆检测设备生产厂家 2024-12-27
- 山东全自动汽车面漆检测设备供应商 2024-12-27
- 开封光学方法汽车面漆检测设备 2024-12-27
- 鞍山偏折光学法汽车面漆检测设备供应商家 2024-12-27


- 宁德全自动汽车面漆检测设备价格 2024-12-26
- 蚌埠汽车面漆检测设备供应商家 2024-12-26
- 开封快速汽车面漆检测设备源头厂家 2024-12-26
- 河北非隧道式汽车面漆检测设备哪家好 2024-12-26
- 丹东偏折光学法汽车面漆检测设备价格 2024-12-26
- 泉州高精度汽车面漆检测设备质量好价格忧的厂家 2024-12-26




- 吉林光学方法汽车面漆检测设备推荐 12-27
- 鞍山代替人工汽车面漆检测设备供应商家 12-27
- 鞍山高精度汽车面漆检测设备 12-27
- 大连偏折光学法汽车面漆检测设备生产厂家 12-27
- 泉州偏折光学法汽车面漆检测设备生产厂家 12-27
- 盐城光学算法配镜机器人推荐厂家 12-27
- 盐城代替人工配镜机器人推荐 12-27
- 山东全自动汽车面漆检测设备供应商 12-27
- 南京远程配镜机器人生产厂家 12-27
- 开封光学方法汽车面漆检测设备 12-27