
- 品牌
- 领先光学技术公司
- 型号
- lxgx-004
此时所述机身再所述顶压弹簧作用下上移。进一步地,所述传动装置包括所述传动腔顶壁内设置的齿轮腔,所述齿轮腔与所述传动腔之间转动设置有第二转轴,所述第二转轴顶部末端转动设置于所述转动腔顶壁内,所述第二转轴内设置有上下贯通的贯通孔,所述传动腔内的所述第二转轴底部末端固定设置有与所述螺纹套外表面固定设置的diyi锥齿轮啮合的第二锥齿轮,所述齿轮腔内的所述第二转轴外表面固定设置有diyi齿轮,所述齿轮腔内可转动的设置有与所述齿轮腔底壁内固定设置的第二电机动力连接的第三转轴,所述齿轮腔内的所述第三转轴外表面固定设置有与所述diyi齿轮啮合的第二齿轮,所述第三转轴顶部末端伸入所述转动腔顶壁内开口向下设置的凹槽内,所述凹槽内的所述第三转轴末端固定设置有与所述凹槽端壁上固定设置的内齿圈啮合的第三齿轮。进一步地,所述联动装置包括所述机身顶壁内设置的转动腔,前后两个所述diyi转轴均贯穿所述转动腔且所述转动腔内的所述diyi转轴外表面固定设置有限位块,所述转动腔内可转动的设置有与前后两个所述蜗轮均啮合的蜗杆,所述转动腔顶壁内可转动的设置有与所述手动轮固定连接的第四转轴。利用计算机视觉模拟人类视觉的功能,从具体的实物进行图象的采集处理、计算、进行实际检测和应用。泉州快速汽车面漆检测设备品牌
汽车面漆检测设备
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。 浙江全自动汽车面漆检测设备推荐厂家这样能大幅提升可靠性,尽可能减少伪缺陷或误报缺陷的数量。

所述螺纹孔内螺纹连接有与左右两个所述滑动块均固定的螺纹杆,所述转动架转动是利用所述传动腔顶壁内设置的传动装置带动所述螺纹套转动,从而带动所述螺纹杆移动,所述螺纹杆移动能够带动左右两个所述滑动块同步移动,其中左侧的所述滑动块内设置有气泵,所述气泵可以在不同时间喷出油漆或抛光液,右侧的所述滑动块底壁内设置有diyi电机,所述diyi电机输出轴末端固定设置有抛光轮,所述抛光轮高速转动同时伴随所述转动架高速转动可以实现对油漆的抛光;所述机身四个边角设置有上下贯通的滑动孔,所述滑动孔内可滑动的设置有底部末端固定有活塞的滑动杆,所述滑动杆顶部末端固定设置有限位块,所述滑动杆端壁内设置有均匀分布的锁定槽,左右两个所述滑动孔之间转动设置有diyi转轴,所述diyi转轴两侧端壁内对称设置有开口向外的花键孔,所述花键孔内可滑动的设置有末端伸入所述锁定槽内的花键杆,所述花键杆与所述花键孔端壁间设置有复位弹簧,当向下按压所述机身时,所述花键杆自上而下依次卡入所述锁定槽内,从而调整机身与所述汽车表面距离,所述机身上方设置有可转动的手动轮,将所述手动轮转动半周通过所述机身顶壁内设置的联动装置可以带动所述花键杆转动半周。
相位偏折术是一个比较冷门的方向,主要用于测量镜面物体。一直以来,干涉法都是测量镜面比较好方法,精度可以达到波长的几百分之一,但是有一些局限性:测量自由面型的镜面物体时,干涉法所需要的光学补偿原件制作复杂且昂贵;回程误差,干涉法很难快速标定;测量环境苛刻,不适合干涉法测量,因为轻微抖动、温度变化,会给测量记过带来很大误差;相位偏折法是一种应用于镜面/类镜面的表面质量检测技术,系统通常由程控条纹光(LCD屏幕)及工业面阵相机组成,光源投射特定图案到待测面上,利用反射图像相位对待测面微小变化敏感特点,根据相位解包裹及重建算法实现三维形貌及缺陷检测(人们不易观察水面形状,但可根据观察物体在水面倒影的变形感知水面波动)。在走停线和随行线中均可检测,便于改造现有产线。

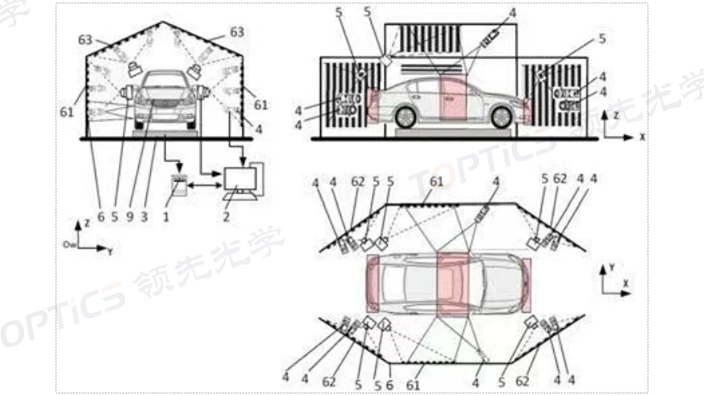
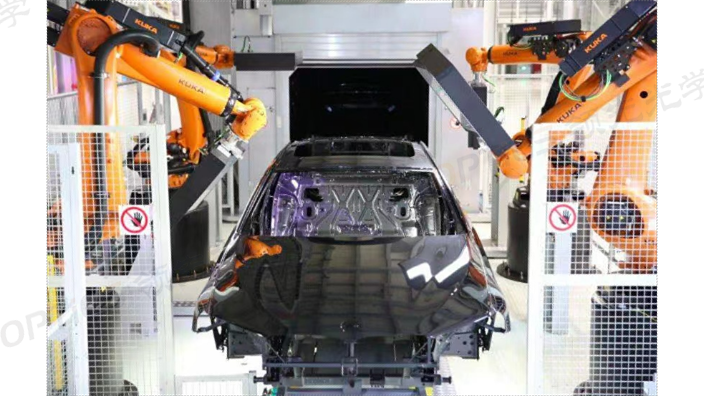
图像处理单元通过使用一系列算法对图片进行处理,获得缺陷3D或2D特征,通过与数据库比对之后,获得缺陷位置、分类、尺寸等信息,然后将数据进行输出。漆膜缺陷自动检测系统构成汽车车身长度一般在~m,宽度在~m,而且车身曲面多,结构比较复杂。为了能将车身外表所有区域都覆盖到,需要增加光源和相机数量或者将光源和相机安装在机器人等可移动设备上,目前研究和应用较多的主要有以下2种结构:1)将光源和CCD相机安装到包围车身的钢结构框架上,通过增加光源和CCD相机数量的方式覆盖整个车身。这种结构的优点是结构简单,调试时只需要调整相机角度,耗时短。缺点是柔性低,不同的车型外形有较大差异时不能通用。2)将光源和CCD相机集成到布置在车身两侧的机器人手臂上,使用2台以上的机器人,可以增加行走轨道扩大检测区域。此结构优点是机器人相对灵活,对车身外表任何区域都可以进行拍摄,柔性高,不同车型可混线检测。缺点就是系统结构复杂,检测一台车的时间相对第一种结构要长。能在40~60JPH的涂装生产线上,用来检测直径mm的缺陷。4台机器人并联使用,每台机器人都安装了1个大尺寸的显示器和4台200万像素的相机,每台相机在一个检测位置会拍摄8张图像。基于深度学习的图像处理算法。厦门代替人工汽车面漆检测设备推荐厂家
自动检测系统是支持在流水线上短周期扫描的系统,不会中断生产节拍,可以大幅提高企业产能和工作效率。泉州快速汽车面漆检测设备品牌
包括四套检测机械手臂、四套漆面视觉检测模组;检测时,被检测汽车移动至检测区域后,四套检测机械手臂分别带动固定在检测机械手臂前端的四套漆面视觉检测模组依据汽车表面轮廓定位检测划分规划得到的采样点,进行汽车表面的全范围成像,成像后通过汽车漆面图像处理提取汽车漆面表面外观缺陷。所述的漆面视觉检测模组包括:n套成像镜头相机组、防护外壳、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板;n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板均刚性固定在防护外壳上;且n套成像镜头相机组、大尺寸条纹投影屏、三个测距传感器、均匀漫射发光板自上而下安装,多套成像镜头相机组、三个测距传感器自左而右均匀分布,大尺寸条纹投影屏设置在多套成像镜头相机组和三个测距传感器之间,均匀漫射发光板设置在三个测距传感器下端。所述的n取值为3时为比较好,三套成像镜头相机组、三个测距传感器自左而右均匀分布,且每套成像镜头相机组与每个测距传感器上下位置对称。所述的汽车表面轮廓定位检测划分规划:通过读取汽车3d模型,将模型分割为多个离散点,再依据n套成像镜头相机组的物方成像视场大小进行离散点的剔除、筛选。泉州快速汽车面漆检测设备品牌
领先光学技术(江苏)有限公司成立于2019年,公司总部地址位于武进区天安数码城内独栋12-2#写字楼。我们的种子企业“ling先光学技术(常熟)有限公司”成立于2014年,是国家高新技术企业、科技型中小型企业、江苏省民营科技企业、雏鹰企业。知识产权80余项(发明专利8项)。内核团队:教授2名、博士2名、行业渠道关键人4人。长期稳定与复旦大学、大连理工大学合作。底层技术包括:光学(相位偏折、白光干涉、白光共焦、深度学习);MicroLED(发光器件、透明显示、微型投影)。是做一件“利用光学进行工业质量检测设备的生产和制造”。自主开发光学系统和底层内核算法,拥有十年以上行业经验,主要应用于:汽车玻璃检测行业、片材检测行业、半导体材料检测行业,我们的战略新产品:微米级光刻机已经完成版流片,也正在一步步趋于稳定和成熟。公司在科技的浪潮中,已经具有将内核技术转化为产品的经验与能力。公司是高科技、高成长性企业,公司不断的夯实自身技术基础,愿成为中国工业发展中奠基石的一份子,打破国外的智能装备的,树名族自有高技术品牌。
动态光散射仪:动态光散射仪用于测量汽车面漆中纳米颗粒(如颜料颗粒、添加剂颗粒)的粒径分布和颗粒运动特性。通过检测激光照射颗粒后产生的散射光强度随时间的涨落,利用相关算法计算出颗粒的粒径大小和分布范围。在面漆生产过程中,该设备可监控颜料分散效果,确保颗粒均匀分散,避免因颗粒团聚导致的漆面外观缺陷和性能下降。热重分析仪:热重分析仪通过在程序控温下测量汽车面漆样品的质量随温度变化的关系,可分析面漆中各成分的热稳定性和挥发特性。在检测过程中,可观察到涂料中溶剂的挥发、树脂的分解等过程,确定面漆的热分解温度和残留量。这对于评估面漆在高温环境下的性能稳定性,以及优化涂料配方和涂装工艺中的烘烤参数具有重要指...
- 孝感汽车面漆检测设备推荐厂家 2025-11-20
- 安徽趋势性汽车面漆检测设备 2025-11-20
- 芜湖非隧道式汽车面漆检测设备供应商 2025-11-20
- 马鞍山偏折光学法汽车面漆检测设备哪家好 2025-11-19
- 马鞍山全自动汽车面漆检测设备质量好价格忧的厂家 2025-11-19
- 安徽高精度汽车面漆检测设备 2025-11-19
- 江苏高精度汽车面漆检测设备推荐厂家 2025-11-19
- 丹东汽车面漆检测设备供应商 2025-11-18
- 芜湖偏折光学法汽车面漆检测设备价格 2025-11-18
- 三明光学方法汽车面漆检测设备源头厂家 2025-11-18


- 沈阳光学方法汽车面漆检测设备品牌 2025-11-17
- 丹东工业质检汽车面漆检测设备品牌 2025-11-17
- 郑州光学方法汽车面漆检测设备哪家好 2025-11-17
- 漳州偏折光学法汽车面漆检测设备哪家好 2025-11-17
- 包头快速汽车面漆检测设备品牌 2025-11-16
- 泉州偏折光学法汽车面漆检测设备质量好价格忧的厂家 2025-11-16





- 杭州在线玻璃面型检测价格 04-14
- 佛山特殊玻璃面型检测费用 04-14
- 深圳视觉玻璃面型检测报价 04-14
- 无锡翘曲度玻璃面型检测哪家好 04-14
- 扬州汽车玻璃面型检测电话 04-14
- 无锡工业玻璃面型检测哪家好 04-14
- 东莞平面度玻璃面型检测费用 04-14
- 扬州高铁玻璃面型检测电话 04-14
- 绍兴工业玻璃面型检测电话 04-14
- 杭州工业玻璃面型检测费用 04-14