因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很高。大儒科技通过智能柔性打磨力控系统简化了复杂轨迹编程问题和机器人靠进给调整打磨力的难点。在打磨过程中的打磨力柔性控制提高了工件的打磨质量、加工效率。大儒科技的力控系统可快速对绝大部分复杂工件完成机器人打磨工艺调试,如圆弧面、倒角等异性面。用户可快速创建复杂运动程序并验证工艺的合理性,可部署在多种机器人上。DFC打磨力控系统可以实现所有材质工件表面的打磨、抛光、去焊缝、的自动化需求。郑州通用力控打磨共同合作

去毛刺飞边机器人是用于材料去除毛刺,锐边处理,或鳍过的金属部件。六轴去毛刺机器人带动铣刀能向人手拿锉刀一样,从铸件四周和上面的任意角度和位置,非常灵活、快速、准确去掉铸件表面的料口和合模线,深孔内部的毛刺及铣通和整理一些应贯通而被铝皮覆盖的孔。工业生产中的部分零配件需要对其外表面进行打磨抛光,比如圆棒工件,现有技术中,采用电机驱动的砂轮对圆棒工件的外表面进行打磨,圆棒工件都有一定的长度,实际打磨时砂轮固定不动,圆棒工件移动,砂轮与圆棒工件之间线接触的打磨,要想打磨圆棒工件的整个外圆周,圆棒工件不但要进行轴线移动,还需要径向的调整位置,存在打磨效率低,圆度不一致的缺陷,有待于改善。为解决上述技术问题,智能柔性打磨力控系统安装在机械手上,力控打磨使得不变化圆棒工件安装位置的情况下一次性打磨结束,打磨效率高,工件打磨后的圆度一致性好,简单实用。重庆直销力控打磨详情打磨力控系统配合机器人进行金属抛光,可以达到要求的高度一致和精确的磨削。

打磨抛光在各个领域都是基础的一道工序,据不完全统计,传统的打磨抛光在有些行业已占成本的30%,主要原因是人工成本高。那么,为什么人工成本会这么高呢?实际上,这与其工作环境是脱离不了关系的。打磨环境下,粉尘污染已经严重威胁到工人的身体健康了,而作为当下时代劳动力主力军的80和90后,大多是不愿意从事这类工作的,这另一方面也造成了打磨行业人才缺口较大。而用机器人代替人工,进行智能打磨,不仅能解决工作环境问题,还能解决人才缺失问题,且约一到两年时间就能回收机器成本。所以,无论是从环境、效率、质量来看,大多数行业更推崇使用机器人来实现自动化生产。近两年机器人打磨抛光市场数据呈持续增长趋势,虽说增长率有所下降,但仍保持在20-30%左右。而机器人打磨主要应用领域在铸件去毛刺去毛刺、3C电子产品外壳打磨、焊缝打磨、木材制品打磨、卫浴五金产品打磨这五方面。
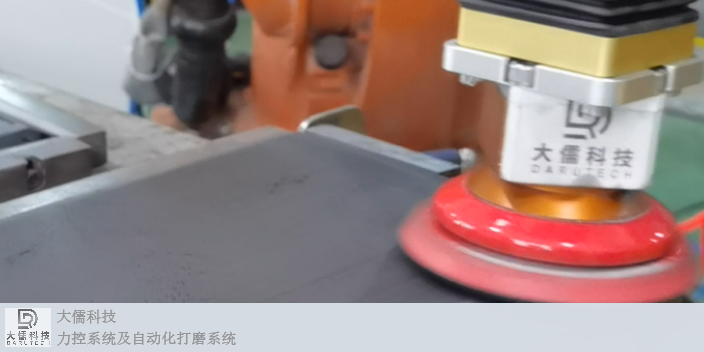
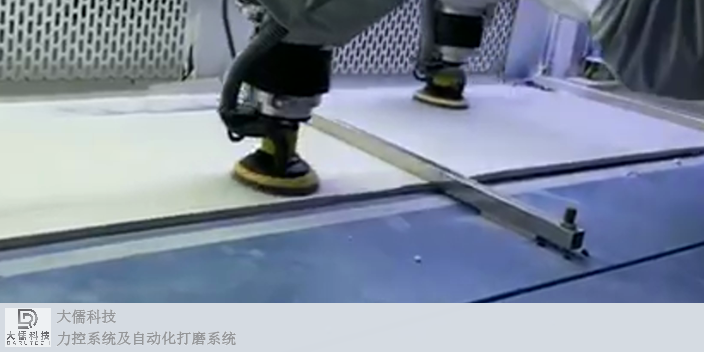
DFC力控系统是用于自动化打磨抛光领域的力控制执行系统。安装于需要实现柔性智能打磨功能的设备末端,比如机器人手臂,直接执行打磨的预设指令,机器人负责路径的执行。力控系统功能:1.柔性控制:在打磨机接触工作的瞬间,以及运行过程中,力控系统以柔性浮动方式,主动适应工件表面的尺寸变化,将力的大小始终控制在所需范围之内。2.不受角度与奋力的影响:可对工件三维空间外形任何角度进行抛光打磨。3.瞬间响应:力控系统在运行过程中,可根据工件表面的变化,瞬间浮动调整,将力的大小控制在所设定范围之内。4.降低机器人示教精度要求:机器人示教只需设定好运行路径,工件表面压力由力控系统完成,机器人示教变得很简单,减少了示教工作的时间,提高了生产效率。5.分段力控功能:此功能可以根据机器人不同路径,分段设定每条路径所需力的大小。6.配方功能:多可保存255个配方,根据对应工件型号随时调用。7.兼容性:本产品适用于各个品牌机器人。8.吸振功能:可降低再打磨抛光过程中,打磨机的高频率振动对打磨机本身和机械手的损伤。DFC力控系统目前有多个型号,适合不同打磨、抛光工作场景。力控系统柔性打磨过程。 金属外壳用大儒科技的智能柔性打磨力控系统。

市场上通常力传感器与机器人来实现柔性打磨。机器人中的力传感器主要分为两类:关节部位的单轴扭矩传感器和机器人末端的6轴力传感器。其中国产的力传感器价格适中,性能也不错,量程50Nm的5000左右,跟HD的谐波减速器价格相当,很多企业能够接受。因为伺服系统中的位置传感器精度非常高,力矩传感器远没有位置传感器那样高精度,力矩传感器信号标准差为。另外,机器人中安装有力矩传感器,有一个比较大的缺陷:刚性降低,当系统中装有力矩传感器后,传动链上会有明显的变形,也即系统的刚性相比于没有力矩传感器的,会下降很多。经过粗略计算,一块与力矩传感器大小一样的钢板,其刚性是它的近10倍。我们知道,传统机器人在做位置控制时,是希望传动刚性伟大越好的。当刚性过低时,不光是控制精度下降,系统也容易不稳定。另外通过只控制电机端完成一定的位置轨迹追踪,同时测量出力矩传感器的信号,得出信号质量并不是很好,这跟系统刚性下降有关。这是由于电机端的运动,经过中间的弹簧后,再传到连杆端;由于弹簧刚性系数较其他部分小很多,导致电机运动经由弹簧后产生了波动,进而导致电机与连杆间的偏差角有波动,使得测量的力矩不够稳定。这种不稳定的力矩信号。智能柔性打磨力控系统适用于消费电子、汽车零配件以及高精度产品的复杂表面与关键焊缝磨抛。重庆直销力控打磨详情
打磨力控系统应用于机器人实现打磨抛光过程中打磨力的柔性控制。郑州通用力控打磨共同合作
铸件去毛刺去毛刺机器人工作分为接触性和非接触性两类。非接触性作业如喷涂和弧焊,这类机器人对轨迹位置控制精度的要求不高,但对于接触式作业,比如装配、打磨,如果还是按照传统的位置控制的话,就会出现偏差,导致容易导致过磨削或欠磨削。由此,我们不得不提到柔顺控制,柔顺控制也分为主动型和被动型,铸件去毛刺常用被动型柔顺控制。在机器人末端会添加一个柔顺机构,当末端执行器与工件发生接触时,末端柔顺执行器能够调整机器的运动轨迹,从而实现力控。如常用的弹簧(橡皮)浮动和气浮动力控打磨头,当接触力过大时,打磨头会远离工件的方向进行偏移运动,当接触力过小时,打磨头会靠近工件方向运动,从而实现衡力打磨。而闭环控制器+浮动顺随补偿器和伺服电主轴的出现又将这种柔顺控制升级了,更好的实现了轨迹位置补偿和加工速度控制。郑州通用力控打磨共同合作
大儒科技(苏州)有限公司属于机械及行业设备的高新企业,技术力量雄厚。大儒科技是一家私营有限责任公司企业,一直“以人为本,服务于社会”的经营理念;“诚守信誉,持续发展”的质量方针。以满足顾客要求为己任;以顾客永远满意为标准;以保持行业优先为目标,提供***的力控系统,模块化打磨工站,自动化打磨系统,柔性打磨机器人。大儒科技将以真诚的服务、创新的理念、***的产品,为彼此赢得全新的未来!