此外,目前,有国内团队将多轴测力传感器技术应用到机器人行业,提升了机器人的智能水平。机器人怎么才能更聪明,一是有视觉,二是有触觉。目前,95%的机器人都有所谓的视觉,如果加了多轴测力传感器,让机器人的手有感知,这样就能极大增强机器人的智能。另外,多轴测力传感器还能用到诸如普通金属件打磨这类附加值不高的工业场合,例如对有触觉的机器人需求比较大的就是打磨工作。在打磨工作中,粉尘对人体有害,工作强度大且安全事故频发。目前,有国内团队也正打算用多轴测力传感器开发智能磨头,让机器人替代人工打磨,从而让更多的企业用上它。力传感器使用必须注意到的问题:屏蔽线的联接及接地点应合理。广东s型测力传感器定制
industryTemplate江苏多维力传感器多少钱拉压力传感器至少有4mA供电。
由一个或多个能在受力后产生形变的弹性体,和能感应这个形变量的电阻应变片组成的电桥电路(如惠斯登电桥),以及能把电阻应变片固定粘贴在弹性体上并能传导应变量的粘合剂和保护电子电路的密封胶等三大部分组成测力传感器。在受到外力作用后,粘贴在弹性体的应变片随之产生形变引起电阻变化,电阻变化使组成的惠斯登电桥失去平衡输出一个与外力成线性正比变化的电量电信号。测力传感器弹性体材料,一般选用金属材质,可选用的材质大部分为铝合金材质、合金钢材质及不锈钢材质。合金材质既有刚度保证形变一致及形变恢复,又有良好的耐候防腐性能。弹性体的主要要求就是能够精确传递受力信息并保持在相同受力时的形变一致性和完全复位性。
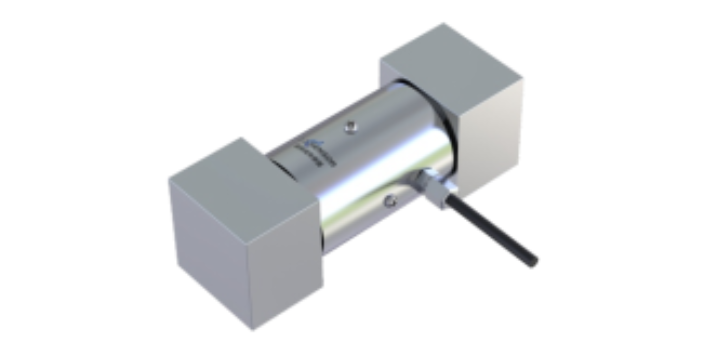
S型测力传感器是一种能在高湿度环境中工作的测力传感器。S型测力传感器采用S型结构,拉压均可使用;应用先进的密封工艺,密封等级达到IP65,能在高湿度环境中工作;S型测力传感器具有较强抗扭、抗侧和抗偏能力,S型测力传感器有单孔结构和双孔结构;有弯曲变形结构和剪切变形结构。S型测力传感器选用比较好的弹性钢和采用箔式应变计工艺。使S型测力传感器具有较好的线行度和重复性。并对S型测力传感器的零点和灵敏度温度影响进行了补偿,保证了传感器的长期稳定性。深圳市鑫精诚传感技术有限公司自成立以来,一直专注于对产品的精耕细作。

压阻式压力传感器的电阻应变片是压阻式应变传感器的主要组成部分之一。金属电阻应变片的工作原理是吸附在基体材料上应变电阻随机械形变而产生阻值变化的现象,俗称为电阻应变效应。陶瓷压力传感器基于压阻效应,压力直接作用在陶瓷膜片的前表面,使膜片产生微小的形变,厚膜电阻印刷在陶瓷膜片的背面,连接成一个惠斯通电桥,由于压敏电阻的压阻效应,使电桥产生一个与压力成正比的高度线性、与激励电压也成正比的电压信号,标准的信号根据压力量程的不同标定为2.0/3.0/3.3mV/V等,可以和应变式传感器相兼容。深圳市鑫精诚传感技术有限公司展望未来,信心百倍,追求高远。六轴力传感器
拉压力传感器在电路中相当于一个特殊的负载。广东s型测力传感器定制
力传感器分类:力能够产生多种物理效应,可采用多种不同的原理和工艺,针对不同的需要设计制造力传感器。力传感器主要有:(1)被测力使弹性体(如弹簧、梁、波纹管、膜片等)产生相应的位移,通过位移的测量获得力的信号。(2)弹性构件和应变片共同构成传感器,应变片牢固粘贴在构件表面上。弹性构件受力时产生形变,使应变片电阻值变化(发生应变时,应变片几何形状和电阻率发生改变,导致电阻值变化),通过电阻测量获得力的信号。应变片可由金属箔制成,也可由半导体材料制成。(3)利用压电效应测力。通过压电晶体把力直接转换为置于晶体两面电极上的电位差。(4)力引起机械谐振系统固有频率变化,通过频率测量获取力的相关信息。(5)通过电磁力与待测力的平衡,由平衡时相关电磁参数获得力的信息。广东s型测力传感器定制