目前我国的打磨抛光方法仍然以手工打磨、手工抛光为主,不仅劳动强度大,加工效率低,对工人技术熟练程度要求高,而且是工人职业病高发领域。因此,自动化打磨抛光设备的大量应用是实现“机械换人”,推动传统制造业实现技术转型升级的重要途径。自动化打磨抛光设备主要由进给系统和打磨抛光头组成,进给系统如关节机器人、直角机器人、并联机构及机床的伺服进给系统等,目前较为成熟和可靠。目前打磨抛光头相对较为粗糙,一般只有打磨抛光的执行机构,缺乏可靠的控制系统和传感系统,无法实现恒力磨削,与进给系统缺乏相互作用、反馈的交互性,无法实时调整,致使现在的自动化打磨抛光设备适应面较窄,无法应对打磨抛光时遇到的各种复杂情况。针对现有技术中存在的上述不足之处,智能柔性打磨力控系统的执行器完成柔性力控制的浮动磨削,通过力控与视觉系统对打磨情况进行感知,反馈给进给系统做出实时调整;采用可自由伸缩的打磨头、被动调整装置、海绵垫等增加打磨效率的同时单、双、三打磨头作业的自由切换可适应有不同需求的场合。深圳智能力控打磨值得推荐

打磨机箱体腻子打磨,又可称为“原子灰打磨。现今因为进入打磨这个行业中的人越来越少,供需的不平衡,造成工人师傅价钱上涨快,而且还找不到师傅。而木工因为大量的机械化施工,使生产力得到很大的提高。打磨这快迫切需要智能柔性设备来解决难题。施工工艺对比:传统施工方式――手工打磨工作效率10-15平方/小时平均100-120平方/天35-45平方/小时,表面质量作业面光滑、平整,人力成本要花费大量的人工、物力,空气中飞舞的灰尘污染环境,影响人体身心健康;对比柔性力控打磨的施工工艺――柔性力控打磨,代替3-4个工人,打磨作业面光滑、细腻、平整,大批量生产也效果一致,配合使用不同粒度砂纸,达到腻子表面效果,缩短工期、简化管理,环境上健康、环保,现场施工环境非常干净清洁。深圳智能力控打磨值得推荐

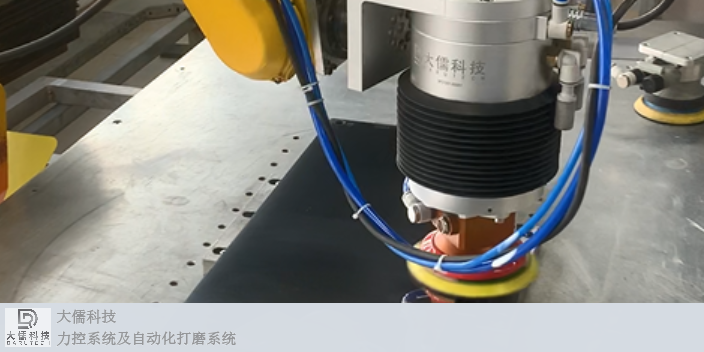
常规钣金箱体焊缝打磨项目简单描述:1.钣金箱体焊接成型后,必须将焊缝磨平。2.箱体焊接后变形,尺寸差异大,且工件装夹精度差。3.一般箱体为多面体,需要多角度打磨。大儒科技智能柔性打磨力控制系统解决方案大儒科技的的力控系统是用于力控打磨,机器人只需要按照示教轨迹做运动,柔性力由力控系统自行完成,用户输入所需要的力值,即可轻松实现智能力控打磨。大儒科技的智能柔性打磨力控系统(ForceControlSystemofintelligentflexiblesaning,简称DFC),前端可搭载多种工具,如气磨机、角磨机、直磨机、砂带机、拉丝机、旋转锉等,适用于不同的应用场景。更多案例访问官网:车窗框焊缝打磨、新能源电池框打磨、新能源电池电极打磨、新能源电池护板打磨等。
有色金属,狭义的有色金属称非铁金属,是指铁、锰、铬以外的所有金属的统称;广义的有色金属还包括有色合金,有色合金是以一种有色金属为基体,加入一种或几种其他要素而组成的合金。在电脑的主板中金属的含量占大概50%,其中主要的有价金属都是有色金属,有色金属经过切割、冲压、打磨、抛光等工艺加工制成电脑主板上的各种零件。现有的有色金属加工打磨抛光装置存在因管状金属固定不牢固而致使影响抛光和打磨效用。因工业机器人准确、可靠、灵活等优势,越来越多的制造企业正在尝试使用工业机器人进行工件打磨、抛光、去毛刺等工作。然而给工业机器人编写精确复杂的打磨轨迹是一大难点。传统的离线编程解决方案能够解决轨迹编程复杂的问题,但是它要求工件一致性好,工作站标定精确,这使得工业机器人在打磨过程中安装、调试和使用难度依然很大。在打磨过程中引入打磨力控系统提高了工件的打磨质量,加工效率以及设备安全性。

在手机的生产中,我们会运用到打磨机对手机中框或背壳进行打磨工作。现有手机中框或背壳打磨抛光工作主要是由人工、机器人或五轴专机进行打磨作业,对作业人员要求高,打磨产品一致性较差,实现性有难度。且一定程度上打磨产生的粉尘对人体危害大,效率低。智能柔性打磨力控系统以解决上述背景技术中提出现有手机中框或背壳打磨抛光工作,对作业人员要求高,打磨产品一致性较差,体力消耗大,打磨产生的粉尘对人体危害大,效率低的问题。为实现上述目的,智能柔性打磨力控系统直接安装在机器人法兰,下方安装现有的打磨工具,设置参数即可投入打磨作业。与现有技术相比,使用智能柔性打磨力控系统有益效果是:实现打磨过程中的柔性力控制,使打磨装置可满足市场上大部分手机中框或背壳幕和平板电脑屏幕的打磨抛光工作,同时提高工作效率、良品率以及产品打磨抛光质量的一致性,解决了现有手机中框或背壳打磨抛光工作主要是由圆盘机加人工配合进行作业,对作业人员要求高,打磨产品一致性较差,体力消耗大,打磨产生的粉尘对人体危害大,效率低的问题。广州智能力控打磨操作简单
深圳智能力控打磨值得推荐
2-3)和气动平行夹爪(2-6),具有与工件外形相同形腔的仿形定位座(2-3)通过支承柱(2-8)安装在底板(2-5)上,仿形定位座(2-3)内设有空腔,安装在底板(2-5)上的气动平行夹爪(2-6)设置在仿形定位座(2-3)的空腔内,且气动平行夹爪(2-6)上具有用于夹住工件的夹头(2-7),底板(2-5)通过紧固件和定位销(2-4)安装在托盘(3-6)对应的螺纹孔和销孔(3-5)内。2.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的工作台(1)沿其周边设有框架(1-1),工作台(1)上部的框架(1-1)两侧及后部设有可移动的透明有机玻璃板(1-2),框架(1-1)前部的两立柱上安装有光栅(1-3),工作台(1)下部的框架(1-1)四周设有侧板(1-5),且工作台(1)下部的空腔用于安装控制箱及电气元器件,侧板(1-5)上设有散热器(1-6),工作台(1)前部设有内凹的前储物仓(1-4)和操作面板。3.根据权利要求1所述的一种基于六轴机器人的注塑件飞边自动打磨设备,其特征在于:所述的固定夹座(5-2)设有用于安装气磨(5-3)或电磨的安装孔,且固定夹座(5-2)的一侧设有与安装孔相通的槽口,固定夹座(5-2)设有贯穿槽口的连接孔,固定夹座(5-2)的安装孔内设有防止气磨(5-3)或电磨旋转的凹槽,气磨。深圳智能力控打磨值得推荐